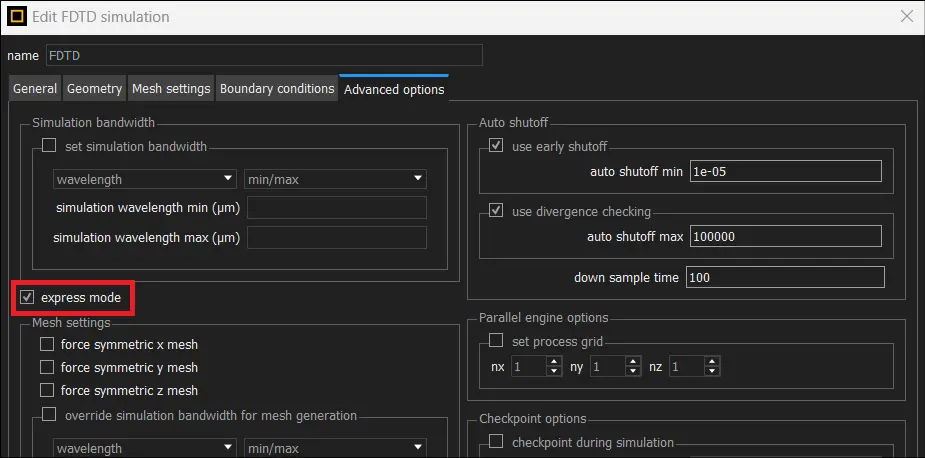
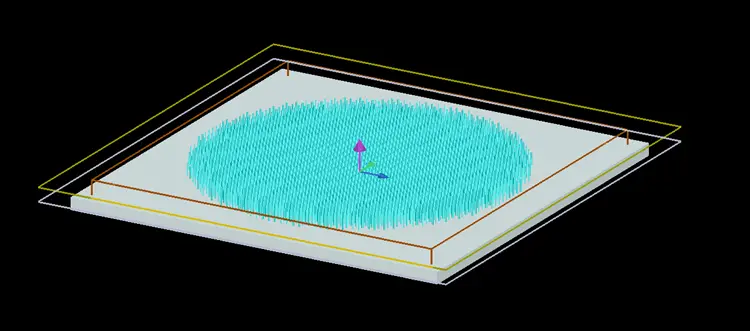
最後に、共振器を調査する際にはFDTDのオートシャットオフ機能を無効にすることをお勧めします。その理由は、非常に小さな帯域幅で光を閉じ込める高Q値な共振器が、広帯域である元の励起エネルギーのわずかな割合しか閉じ込めない可能性があるためです。その結果、オートシャットオフがあまりにも早く発動することとなり、時間アポダイゼーションのモニターに問題を引き起こす可能性があります。オートシャットオフは、FDTDシミュレーション領域の詳細オプションタブにある “use early shutoff”のチェックを外すことで、無効にすることができます。
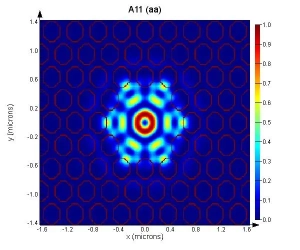
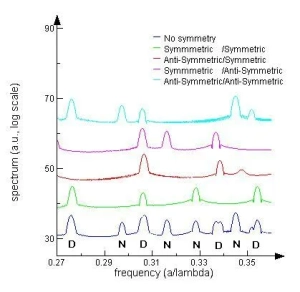
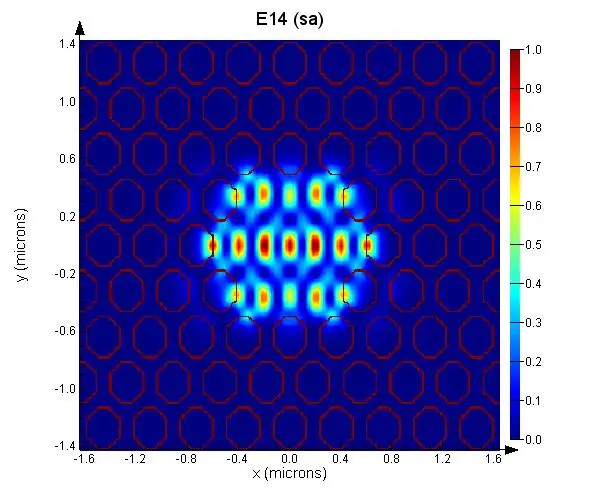
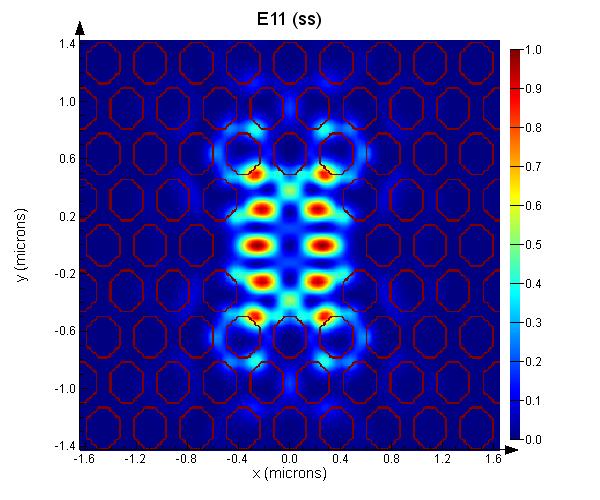
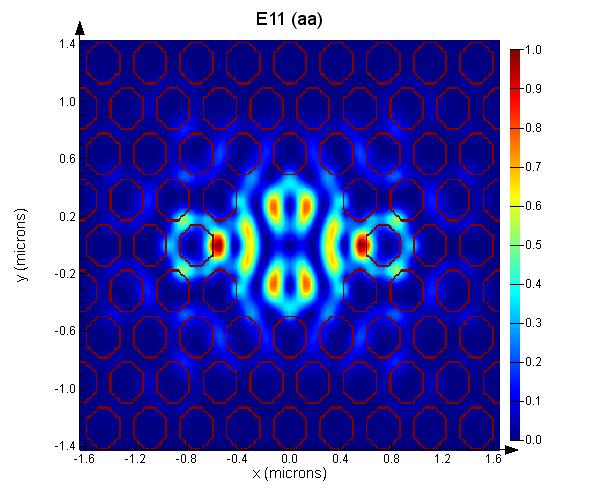
Tang, Y. Mintairov, A.M. Merz, J.L. Tokranov, V. Oktyabrsky, S., Characterization of 2D-photonic crystal nanocavities by polarization-dependent photoluminescence, 5th IEEE Conference on Nanotechnology, July 2005, vol. 1, pp 35-38
e2 = farfield3d("reflection",1,200,200,1,1,1,1);
ux = farfieldux("reflection",1,200,200,1);
uy = farfielduy("reflection",1,200,200,1);
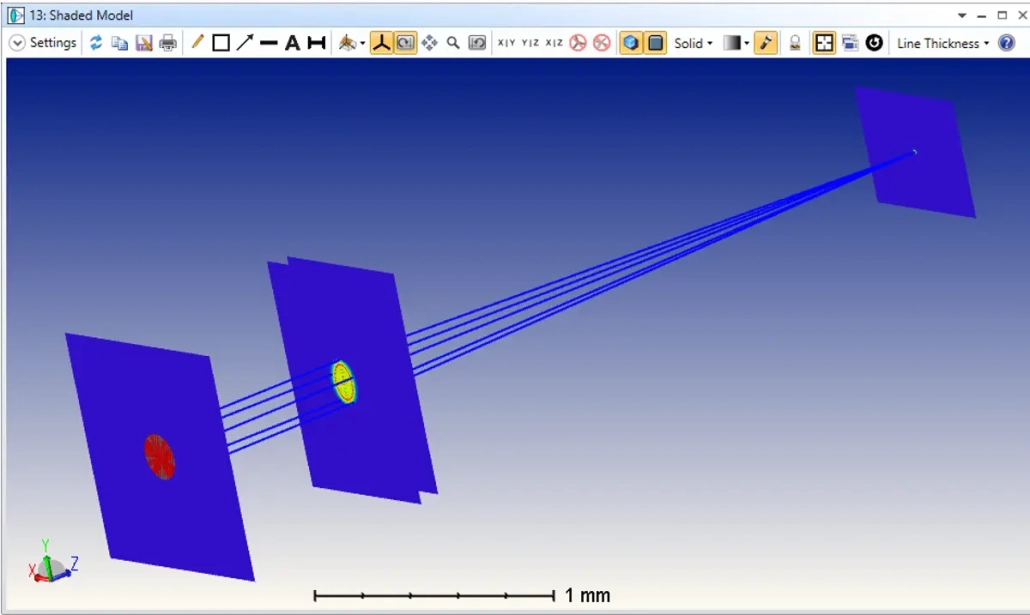
# calcualtes portion of e field within the divergence angle of the lens (or the Gaussian source)
signal=farfield3dintegrate(e2,ux,uy,divergence_angle)/farfield3dintegrate(e2,ux,uy);
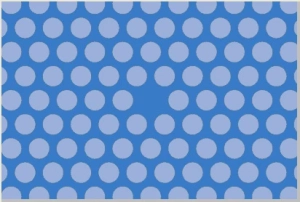
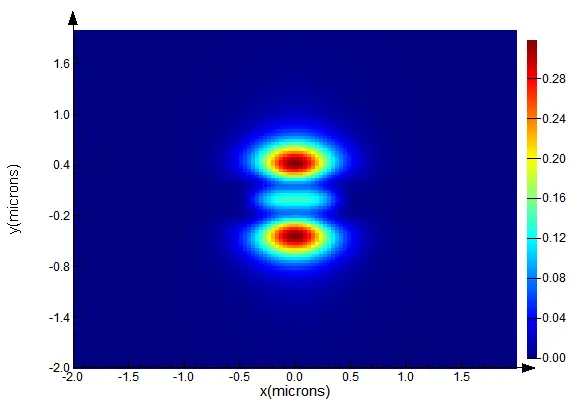
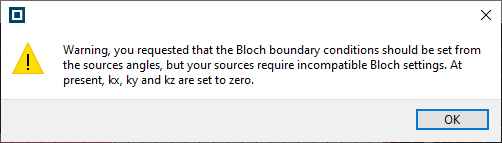
X方向に周期境界条件を使用した以外は、上と同一の設定です。これはよくある間違いです。なぜなら、平面波のkxが0ではないからです。同様の間違いは、”set based on source angle”が使用されていない場合にも発生するでしょう。この間違いはシミュレーション境界での散乱として確認できます。
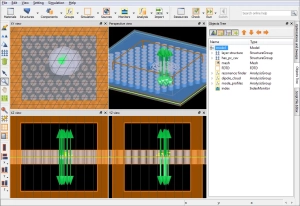
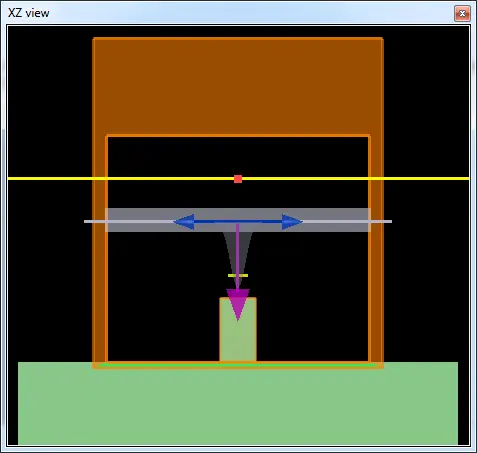
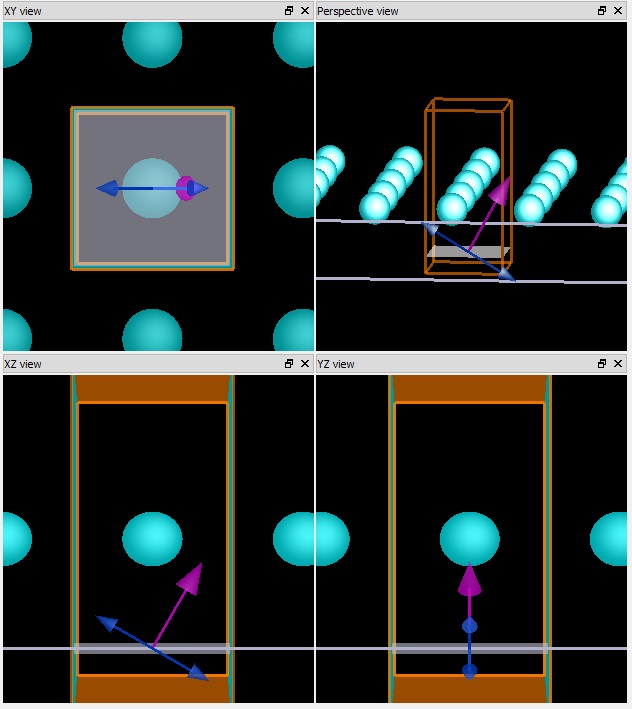
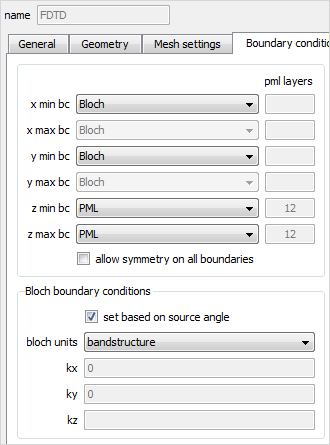
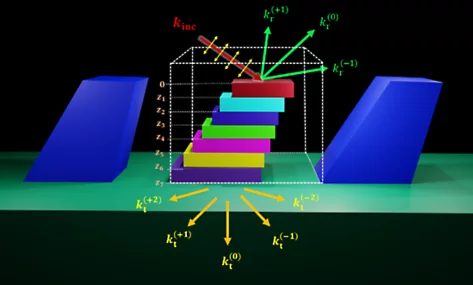
ブロッホ境界条件と角度をもった平面波を含むシミュレーションを行う場合、下の図に示されているように、“set based on source angle” オプションを使用して下さい。この設定はブロッホ境界条件を使用する場合のみ設定できます。このオプションを使用しない場合、kx, ky, kzをそれぞれ手動で設定しなければなりません。 手動でのブロッホベクトルの設定は、バンド構造シミュレーションでは重要になります。
We may request cookies to be set on your device. We use cookies to let us know when you visit our websites, how you interact with us, to enrich your user experience, and to customize your relationship with our website.
Click on the different category headings to find out more. You can also change some of your preferences. Note that blocking some types of cookies may impact your experience on our websites and the services we are able to offer.
Essential Website Cookies
These cookies are strictly necessary to provide you with services available through our website and to use some of its features.
Because these cookies are strictly necessary to deliver the website, refusing them will have impact how our site functions. You always can block or delete cookies by changing your browser settings and force blocking all cookies on this website. But this will always prompt you to accept/refuse cookies when revisiting our site.
We fully respect if you want to refuse cookies but to avoid asking you again and again kindly allow us to store a cookie for that. You are free to opt out any time or opt in for other cookies to get a better experience. If you refuse cookies we will remove all set cookies in our domain.
We provide you with a list of stored cookies on your computer in our domain so you can check what we stored. Due to security reasons we are not able to show or modify cookies from other domains. You can check these in your browser security settings.
Google Analytics Cookies
These cookies collect information that is used either in aggregate form to help us understand how our website is being used or how effective our marketing campaigns are, or to help us customize our website and application for you in order to enhance your experience.
If you do not want that we track your visit to our site you can disable tracking in your browser here:
Other external services
We also use different external services like Google Webfonts, Google Maps, and external Video providers. Since these providers may collect personal data like your IP address we allow you to block them here. Please be aware that this might heavily reduce the functionality and appearance of our site. Changes will take effect once you reload the page.
Google Webfont Settings:
Google Map Settings:
Google reCaptcha Settings:
Vimeo and Youtube video embeds:
Other cookies
The following cookies are also needed - You can choose if you want to allow them:
Privacy Policy
You can read about our cookies and privacy settings in detail on our Privacy Policy Page.